车辆坐标转换
车辆坐标转换
解决问题:
1)地球是不规则的球体,两极扁,赤道鼓。不能
简单地做为圆球体来计算;
2)每纬度在地理位置上的距离是一致的(约
111 km),但是每经度之间的距离是不同的(越往两极,东
西方向上的距离就越小),不能直接转换为直角坐标系;
WGS84坐标系全称World Geodetic System -
1984,是为了解决GPS定位而产生的全球统一的一个地心坐标系。
●
椭球体:WGS84椭球
● 长半径\(a=6378137m\)
● 短半径\(b=6356752.3142m\)
●
第一偏心率平方\({e_1}^2=0.00669437999013\)
●
第二偏心率平方\({e_2}^2=0.006739496742227\)
●
扁率\(\alpha=1/298.257223563\)
1 | |
车辆方向转换
上面将经纬度转换为了地心直角坐标,然而速度方向拿到则是一个大陆坐标系下的与正北方的顺时针夹角。所以这里要对其进行转换。
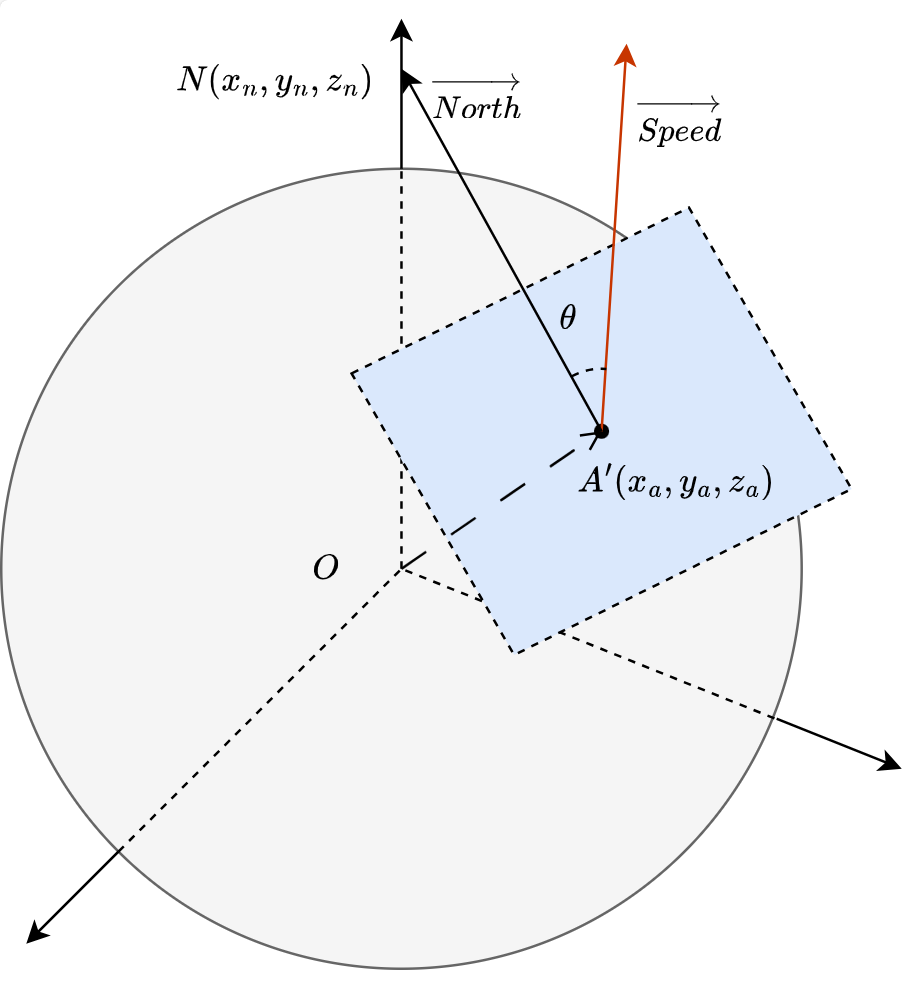
假设条件:
- 车辆所处大陆平面坐标系与地球球面相切
已知条件为:
- 车辆坐标 \((x_a,y_a,z_a)\)
- 车辆速度方向与正北方顺时针夹角 \(\theta\)
首先,根据已知条件1可得车辆所属的平面的一个法向量和平面点法式方程如下: \[ \overrightarrow{OA} = \begin{bmatrix} x_a \\ y_a \\ z_a \end{bmatrix} \] \[ x_a(x-x_a) + y_a(y-y_a) + z_a(z-z_a) = 0 \]
根据假设条件1可知,平面内向北的向量 \(\overrightarrow{O'N}\)这里令其为 \(\overrightarrow{North}\)与坐标下的Z轴交于 N
点。
首先根据向量加法得到: \[
\overrightarrow{ON} = \overrightarrow{OO'} + \overrightarrow{O‘N}
\]
把上式与平面方程联立可得: \[ \overrightarrow{North} = \begin{bmatrix} -x_a \\ -y_a \\ \frac{x_a^2+{y_a}^2}{z_a} \end{bmatrix} \]
根据已知条件\(\overrightarrow{Speed}\)为车辆速度的单位向量所以有: \[ \vert \overrightarrow{Speed} \vert = 1 \]
根据向量点乘公式: \[ \overrightarrow{North} \cdot \overrightarrow{Speed} = \vert \overrightarrow{North} \vert \vert \overrightarrow{Speed} \vert \cos{\theta} \]
向量 \(\overrightarrow{Speed}\)在平面上,则其与平面法向量垂直: \[ \overrightarrow{OA} \cdot \overrightarrow{Speed} = 0 \]
联立上述三个公式得到向量 \(\overrightarrow{Speed}\)表达式如下:
辅助符号: \[ D_{xy} = {x_{a}}^2+{y_{a}}^2
\] \[ D_{xyz} =
{x_{a}}^2+{y_{a}}^2+{z_{a}}^2 \] \[ V
= \sqrt{\frac{1-\cos^2{\theta}}{D_{xy}}} \] \[ U = \sqrt{ \frac{D_{xy} D_{xyz}}{z_a^2} }
\]
解1: \[ \overrightarrow{Speed_1} = \begin{bmatrix} yV - \frac{x_{a} z_{a}^2 U\cos{\theta}}{D_{xy} D_{xyz}} \\ -xV - \frac{y z^2 U \cos{\theta}}{D_{xy} D_{xyz}} \\ \frac{z_{a} U \cos{\theta}}{D_{xyz}} \end{bmatrix} \] 解2: \[ \overrightarrow{Speed_2} = \begin{bmatrix} -yV - \frac{x_{a} z_{a}^2 U\cos{\theta}}{D_{xy} D_{xyz}} \\ xV - \frac{y z^2 U \cos{\theta}}{D_{xy} D_{xyz}} \\ \frac{z_{a} U \cos{\theta}}{D_{xyz}} \end{bmatrix} \] 当 \(\theta \in (0, \pi)\)时,取解2;当 \(\theta \in (\pi, 2 \pi)\)时,取解1;